
En este artículo, exploraremos el tipo de sensor utilizado para medir la distancia entre un robot y un objeto. Los sensores desempeñan un papel crucial en la navegación y percepción de los robots, permitiéndoles interactuar con su entorno de manera precisa y eficiente. Comprender qué tipo de sensor es adecuado para medir la distancia entre un robot y un objeto es esencial para el diseño y funcionamiento de estos sistemas robóticos. A continuación, analizaremos las opciones más comunes y las características clave de cada tipo de sensor.
Contenidos
Sensores utilizados por robots.
Los robots utilizan una variedad de sensores para interactuar con su entorno y realizar tareas específicas. Estos sensores les permiten detectar y medir diferentes variables, como la distancia, la presión, la temperatura y la luz. Algunos de los sensores más comunes utilizados por los robots incluyen:
1. Sensores de proximidad: Estos sensores permiten al robot detectar la presencia de objetos o personas en su entorno cercano. Pueden utilizar diferentes métodos, como la detección de infrarrojos o ultrasonidos, para medir la distancia entre el robot y el objeto.
2. Sensores de contacto: Estos sensores permiten al robot detectar cuando entra en contacto con un objeto o superficie. Pueden utilizar diferentes tecnologías, como interruptores táctiles o sensores de presión, para detectar la fuerza o el contacto físico.
3. Sensores de visión: Estos sensores permiten al robot capturar imágenes o videos de su entorno y procesarlos para reconocer objetos o realizar tareas específicas. Pueden utilizar cámaras o sensores de luz para capturar la información visual.
4. Sensores de temperatura: Estos sensores permiten al robot medir la temperatura de su entorno o de objetos específicos. Pueden utilizar termopares o termistores para convertir la temperatura en señales eléctricas que el robot puede interpretar.
5. Sensores de movimiento: Estos sensores permiten al robot detectar y medir el movimiento en su entorno. Pueden utilizar acelerómetros o giroscopios para medir la aceleración o la orientación del robot.
6. Sensores de luz: Estos sensores permiten al robot medir la intensidad de la luz en su entorno. Pueden utilizar fotodiodos o fototransistores para convertir la luz en señales eléctricas que el robot puede interpretar.
7. Sensores de sonido: Estos sensores permiten al robot detectar y medir el sonido en su entorno. Pueden utilizar micrófonos o sensores de sonido para convertir las ondas sonoras en señales eléctricas que el robot puede interpretar.
Estos son solo algunos ejemplos de los sensores utilizados por los robots. Dependiendo de su función y aplicación específica, los robots pueden utilizar una combinación de diferentes sensores para interactuar con su entorno y realizar tareas de manera eficiente.
Sensor de orientación para robots.
Un sensor de orientación para robots es un dispositivo que permite a un robot determinar su posición y dirección en un entorno determinado. Este tipo de sensor es esencial para que los robots puedan navegar de manera autónoma y realizar tareas específicas.
Algunos ejemplos de sensores de orientación utilizados en robots incluyen:
1. Brújula: Una brújula magnética es un sensor comúnmente utilizado en robots para determinar la orientación basada en el campo magnético terrestre. Este sensor puede proporcionar información precisa sobre la dirección en la que se encuentra el robot.
2. Giroscopio: Un giroscopio mide la velocidad angular y la orientación del robot en relación con un eje de referencia. Este sensor es útil para detectar cambios en la orientación del robot y realizar ajustes en tiempo real.
3. Acelerómetro: Un acelerómetro mide la aceleración lineal del robot en diferentes direcciones. Este sensor puede ser utilizado para determinar la orientación del robot en relación con la gravedad y detectar cambios en la velocidad y dirección de movimiento.
4. Sistema de visión: Un sistema de visión, como una cámara o un sensor de infrarrojos, puede ser utilizado para capturar imágenes del entorno circundante y determinar la orientación del robot en función de puntos de referencia visuales. Este tipo de sensor es útil para la navegación en entornos desconocidos.
Función del sensor de distancia
El sensor de distancia es un dispositivo electrónico que se utiliza para medir la distancia entre el sensor y un objeto o superficie. Su principal función es determinar la distancia de manera precisa y en tiempo real.
Algunas de las aplicaciones comunes del sensor de distancia incluyen la detección de obstáculos en vehículos, como en los sistemas de estacionamiento asistido. También se utiliza en la robótica para evitar colisiones y en sistemas de seguridad para detectar intrusos.
El sensor de distancia utiliza diferentes tecnologías para medir la distancia. Algunos de los tipos más comunes son:
1. Sensor ultrasónico: Utiliza ondas de sonido de alta frecuencia para medir la distancia. El sensor emite una señal ultrasónica y luego mide el tiempo que tarda en recibir el eco de la señal reflejada por el objeto.
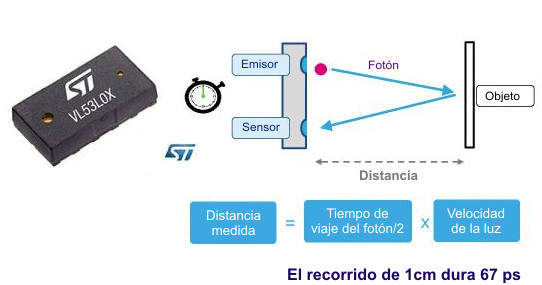
2. Sensor infrarrojo: Emite un haz de luz infrarroja y mide el tiempo que tarda en recibir la luz reflejada por el objeto. La distancia se calcula en función del tiempo de vuelo de la luz.
3. Sensor láser: Emite un rayo láser y mide el tiempo que tarda en recibir el reflejo del rayo. Proporciona mediciones precisas y se utiliza en aplicaciones que requieren alta precisión.
La precisión y el rango de medición del sensor de distancia pueden variar según el tipo de tecnología utilizada. Algunos sensores pueden medir distancias de solo unos pocos centímetros, mientras que otros pueden medir distancias de varios metros.
El sensor más comúnmente utilizado para medir la distancia entre un robot y un objeto es el sensor ultrasónico. Este tipo de sensor emite ondas sonoras y mide el tiempo que tarda en recibir el eco de esas ondas después de que rebotan en el objeto. A partir de ese tiempo, el sensor puede calcular la distancia.





